


Новиот робот TARS3D го имитира култниот TARS од филмот Interstellar, со одење, тркалање и напредни алгоритми за движење.
Ако некој би сакал да направи вистински HAL 9000, би му биле доволни LED светло, малку дрводелство и лаптоп со гласовен AI модел. За конструкција на R2-D2 веќе е потребно многу повеќе труд. Но да се создаде функционална верзија на TARS од научнофантастичниот хит Interstellar на Кристофер Нолан — робот-блок кој се преобразува од квадра во машина со метални столбови — бара сосема друго ниво на знаење.
Токму тоа успеаја да го постигнат Адитија Српади, дипломец на Институтот за роботика при Универзитетот Карнеги Мелон и виш инженер во компанијата Nimble.ai, заедно со соработникот Абишек Вориер. Двајцата го изградија TARS3D и објавија труд кој беше финалист за наградата „Mike Stilman“ на IEEE Humanoids конференцијата во Сеул.


TARS3D ги комбинира телескопските столбови, машинското учење и филмскиот дизајн за првата вистинска повеќенаменска верзија на TARS
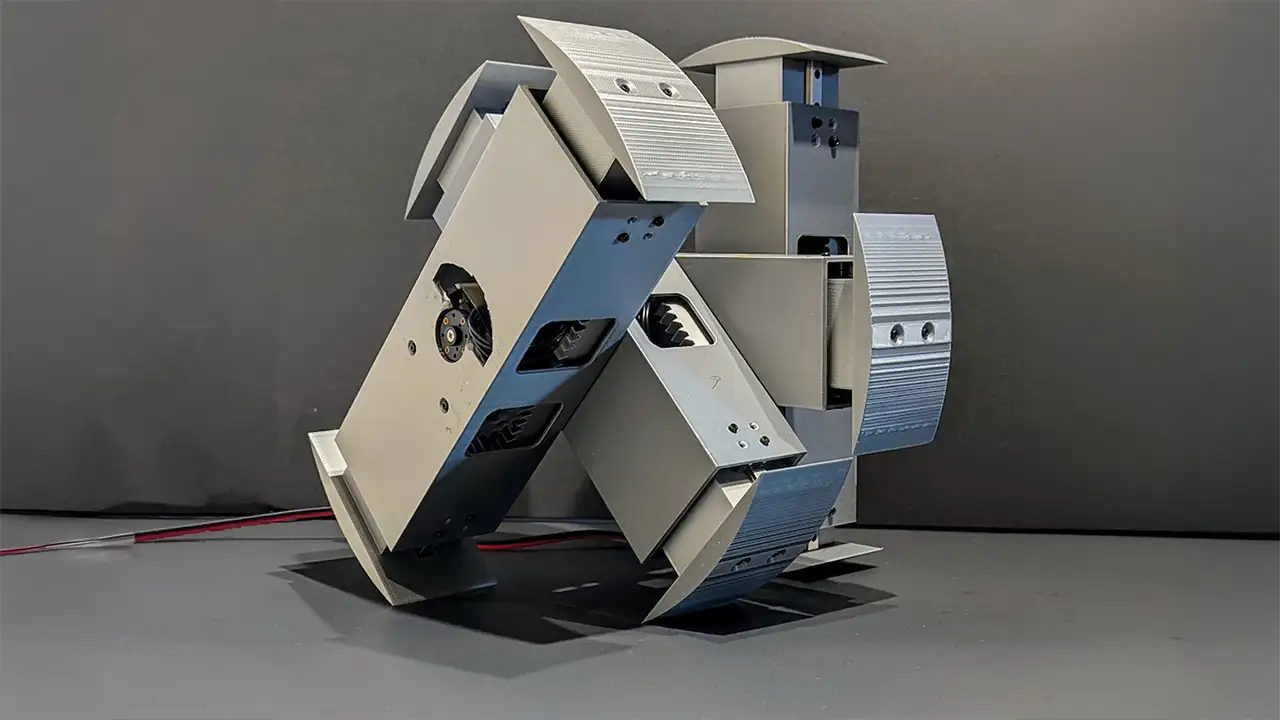
TARS3D користи четири независно подвижни, телескопски столбови кои за момент се преобразуваат во X-структура, додека закривените сегменти на горниот и долниот дел се претвораат во контактни „стапалки“ за тркалање. Така роботот се трансформира во двоен обрач без класични тркала и може да се движи и со одење и со тркалање — што, според авторите, е првата веродостојна имитација на TARS со двете форми на движење.
Филмскиот TARS секако имаше полесна задача: беше голем механизам управуван со кукловодци, кои подоцна дигитално беа отстранети, а за „тркалањето“ беше користен моторизиран транспортер. Кај TARS3D сè започнува од реална механика и алгоритми.
Роботот има седум степени на слобода, вклучувајќи три ротациони и четири линеарни движења, а авторите нагласуваат дека роботот открива обрасци на движење кои не се лесно решливи со аналитички пристап.
Во експериментите било користено длабоко „reinforcement“ учење и симулации за да се совладаат различни обрасци на одење и тркалање, при што се покажало дека неговата специфична структура овозможува повеќе начини на движење кои досега не биле истражени во роботиката. Целта е создавање мултимодален робот кој може да се прилагодува на теренот и задачите.
TARS3D засега е мал прототип, висок 25 cm и тежок 990 грама. Изработен е од делови печатени со 3D-печатач и сè уште е жично поврзан. Планот е да се тестира на различни подлоги и да се развие во самостојна платформа. Српади наведува дека работата на овој робот, започната кон крајот на 2022 година без лабораторија и финансирање, претставувала враќање кон исконската фасцинација од роботиката: моменти на воодушевување, фрустрации и откритија кои доаѓаат со создавање нов вид движење и однесување кај машините.
