


Успешната демонстрација на технологијата на вештачка интелигенција во планирањето на патеките на Марс отвора нова ера на автономно истражување на вселената и ја намалува зависноста од директни инструкции од операторите на Земјата.
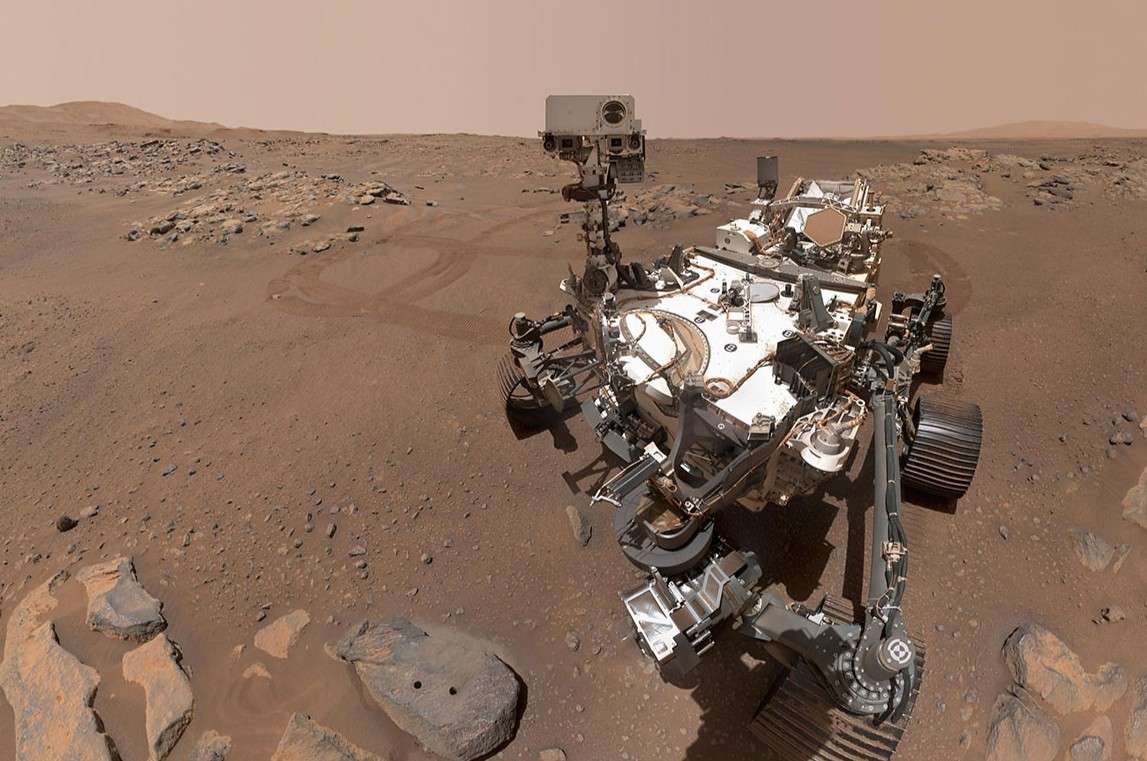
Робверот на NASA, Perseverance неодамна направи уште еден историски исчекор во истражувањето на вселената. Тој, всушност, изврши први возења на вториот планет кои беа целосно испланирани од вештачка интелигенција. Демонстративните возења беа извршени на 8 и 10 декември минатата година под водство на Лабораторијата за реактивен погон на NASA (JPL). Овој подвиг, велат од NASA, означува премин од традиционалното, рачно планирање на патеки кон користење напредни генеративни модели кои дозволуваат роверот самостојно да донесува одлуки во сложениот терен на кратерот Језеро.
Автономно по Марс
За време на тестирањето, тимот стручњаци користеше генеративна вештачка интелигенција, поточно јазични и модели за компјутерски вид развиени во соработка со компанијата Anthropic. Нивниот AI анализираше постоечки податоци од базите на JPL и орбитални снимки со висока резолуција од камерата HiRISE. Врз основа на тие информации, системот самостојно идентификуваше клучни карактеристики на теренот како карпи, песочни наноси и опасни камења, и генерираше патеки со прецизни навигациски инструкции – задачи кои досега ги извршуваа исклучиво човечки планери.

Значењето на оваа технологија лежи во премостувањето на комуникациската „црта“ меѓу Земјата и Марс, чија просечна меѓусебна оддалеченост изнесува околу 225 милиони километри, па сигналите патуваат од три до 22 минути во еден правец. Поради таквата оддалеченост и задоцнувањето на сигналот, управувањето со роверот во реално време е невозможно, па патеките досега се планираа и испраќаа однапред. Примената на AI технологијата ќе овозможи роверите да поминуваат поголеми растојанија со помало оптоварување за операторите на Земјата, што директно го зголемува научниот ефект на мисијата, овозможувајќи побрз пристап до интересни геолошки локации.
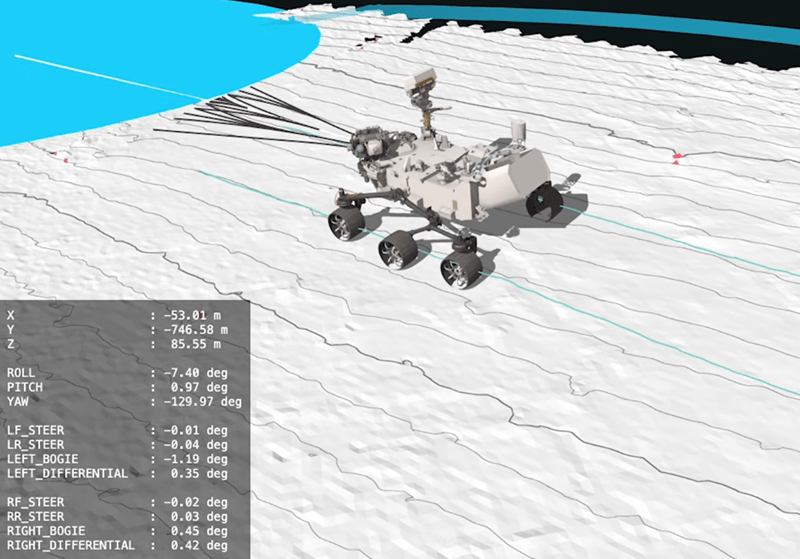
Пред испраќање на командите на Марс, инженерскиот тим ја проверуваше секоја патека преку „дигитален близнак“ – виртуелна реплика на роверот. Во тоа симулирано опкружување беа проверени преку 500.000 телеметриски варијабли за да се обезбеди целосна компатибилност со софтверот на роверот. Првото AI возење беше долго 210 метри, додека два дена подоцна Perseverance помина дополнителни 246 метри.
Иднината на вселенските мисии
Според зборовите на администраторот на NASA, Jared Isaacman, оваа демонстрација покажува колку автономните технологии напреднале и како тие ќе ги обликуваат идните мисии. Целта е да се развијат системи кои самостојно ќе можат да планираат возења од повеќе километри и автоматски да ги препознаваат научно важните локалитети. Интеграцијата на интелигентните системи не се планира во NASA само за роверите на површината, туку и за летала како хеликоптери и дронови, кои исто така ќе бидат испратени на Марс во иднина.
Инженерите од JPL истакнуваат дека станува збор за технологија која ги менува правилата на играта, овозможувајќи роботските системи да ја користат „колективната мудрост“ на инженерите и научниците складирана во алгоритмите. На тој начин се поставува темел за инфраструктура која ќе поддржува напредни истражувања на длабокиот вселенски простор во децениите што доаѓаат.
